::產品概述::
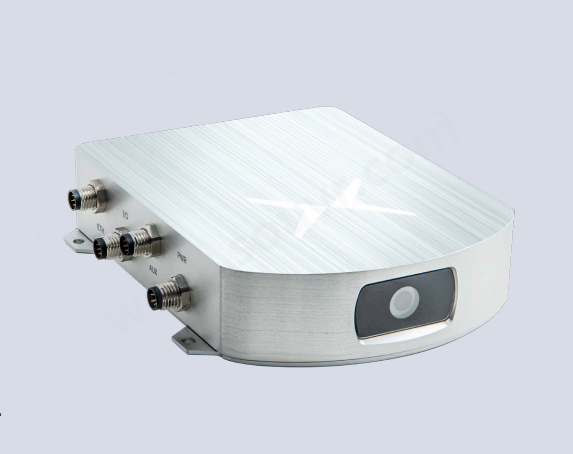
Movella Xsens Vision Navigator 視覺強化慣性導航系統
Movella Xsens Vision Navigator 視覺強化慣性導航器是一個擁有雙RTK全球導航衛星系統/慣性導航系統的視覺導航單元,Movella Xsens Vision Navigator 由視覺慣性里程計技術支持,用于精確跟蹤3D位置、速度和具有挑戰性室外和無GNSS環境。
Vision Navigator的位置漂移取決于移動距離,而不是在傳統GNSS/INS設備中常見的取決于時間。
雙天線和內置IMU(慣性測量單元)能夠為Vision Navigator?提供可靠的航向信息,這使得Vision Navigator?即使在低速行駛或停止不動的情況下也能夠準確的提供航向位置。
此外,Vision Navigator還可以接收里程表數據,并具有內部錄制存儲器。
Movella Xsens Vision Navigator 擁有基于瀏覽器的圖形用戶界面,由持有Github資源的ROS提供支持。
::產品規格::
| 規格 | Movella Xsens Vision Navigator 視覺強化慣性導航系統 |
| 傳感器融合性能 |
| 滾動、俯仰: | <0.4 deg |
| 偏航/航向: | 0.4 deg (1米天線基線) |
| RTK定位精度: | 1cm + 1ppm |
| GNSS中斷期間的位置精度: | 行駛距離的0.75% |
| 速度: | 0.1 m/s |
| 陀螺儀 |
| 標準全范圍: | 2000 deg/s |
| 噪聲密度: | 0.003 o/s/√Hz |
| 加速計 |
| 標準全范圍: | 16 g |
| 噪聲密度: | 65 μg/√Hz |
| GNSS 接收器 |
| 品牌: | u-blox |
| 模型: | ZED-F9P (2x, 慣性) |
| RTK校正輸入: | RTCM 3.3 |
| RTCM輸入端口: | 以太網、Wifi或串行 |
| 氣壓計 |
| 標準全范圍: | 260-1250 hPa |
| 總RMS噪聲: | 0.75 Pa |
| 其他參數 |
| IP等級: | IP67 |
| 操作溫度: | -30 to 85 oC |
| 外殼材料: | 鋁 |
| 安裝方向: | 根據周圍環境決定 |
| 尺寸: | 129x113.6x30 mm |
| 連接器: | M8 8-pins x3, M8 4-pins x1, SMA x3, USB-C x1 |
| 重量: | 420 g |
| 認證: | CE |
| 電源 |
| 輸入電壓: | 4.5-36V |
| 功耗(典型值): | 7.5 W |
| 接口/ IO |
| 接口: | UART、以太網、Wifi、USB-C |
| 同步選項: | SyncIn,SyncOut(PPS) |
| 協議: | ASCII、NMEA和ROS |
| 輸出頻率: | 高達200赫茲 |
| 軟件套件 |
| GUI: | 基于瀏覽器的圖形用戶界面 |
| SDK(示例代碼): | Github C++庫 |
| 驅動: | ROS |
| 支持: | 基于XSENS:在線手冊,社區和知識庫 |
::資料下載::
Movella Xsens Vision Navigator 視覺強化慣性導航系統