熱門


Awinda版")
Awinda版")
 Link版")
 Link版")
據(jù)手套")
虛擬裝配與碰撞檢測技術解決方案
虛擬裝配與碰撞檢測技術解決方案



過去,在虛擬裝配、虛擬維修等VR應用領域,3D曲面模型之間的實時碰撞檢測一直是仿真用戶的開發(fā)障礙和技術瓶頸,而今天,高級虛擬仿真用戶再也不需要為復雜的碰撞檢測數(shù)學算法和漫長的開發(fā)周期而發(fā)愁,更不需要為了因碰撞檢測而帶來的巨大計算量而去采購價格昂貴的大型工作站,現(xiàn)在你只需要擁有一臺高端的基于windows 平臺的PC工作站,或是一臺臺式機,甚至是一臺筆記本電腦便可以輕松、快速地開發(fā)出你所需要的碰撞檢測應用,無論是多么復雜的3D曲面模型之間的實時碰撞和檢測分析, 一切都將變得那么的簡單而隨心所欲,它是SmartCollision?一個來自美國和日本科學家共同研發(fā)的基于多邊形的碰撞檢測庫和計算機力反饋(計算機觸覺)應用驅動引擎,或判斷物體是否有穿透能力,SmartCollision?不僅可以計算穿透深度,而且還能檢測和分析滲透量,更可貴的是它在精確地處理復雜3D曲面體之間的實時碰撞檢測分析的同時,還讓你的應用程序跑得飛快,這一切使得它在虛擬裝配、虛擬維修、虛擬操做、人工智能、地震救援演示碰撞檢測分析、虛擬力反饋和計算機觸覺等應用領域發(fā)揮了巨大的作用,將虛擬仿真應用的開發(fā)效率和仿真真實感成百倍的提高。
 ?
?

基于多邊形的碰撞檢測庫
SmartCollision?是一個基于多邊形的碰撞檢測庫。之前大部分的碰撞檢測庫僅僅能計算不相交物體間的距離,或判斷物體是否有穿透能力,而SmartCollision?可以計算穿透深度,測量滲透量。
穿透深度
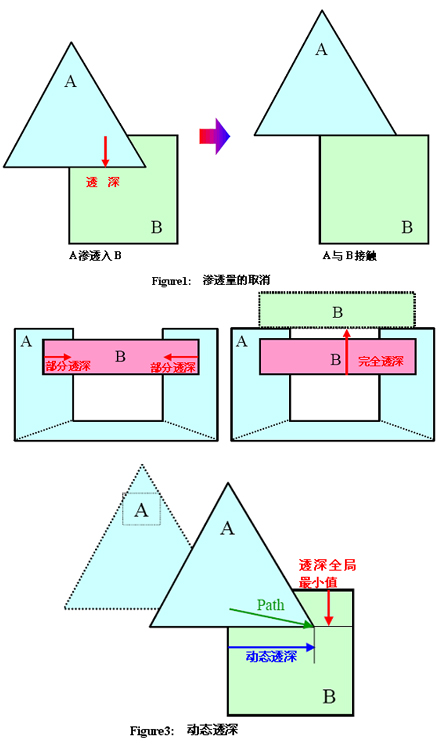
為了在虛擬的環(huán)境中操作虛擬的對象,多面體之間的“透深”計算非常重要。當物體是可穿透的時候,“透深”在這里是指滲透量測量。 透深可以取消滲透量。
以前在虛擬環(huán)境需要計算常規(guī)多面體之間的透深,但是透深僅僅是在凸狀多面體或有限的基本單元之間被計算。實際上,已有的實現(xiàn)方法中常規(guī)多面體之間的透深是通過凸狀多面體的透深來計算的,但對于這種實現(xiàn),常規(guī)多面體之間的透深沒有被直接結算并且結果也不是那么可靠和準確。由于凸狀多面體的透深不是總體上通過計算常規(guī)多面體的滲透量,而是通過計算部分滲透量來得到,因此不能刪除常規(guī)多面體間滲透量(參見 Figure 2)。另外還有一種實現(xiàn),該實現(xiàn)方法是通過利用體素(voxel)代替多面體來表現(xiàn)。但是體素(voxel)表現(xiàn)沒有多面體表現(xiàn)精確。這種實現(xiàn)不是總體上基于常規(guī)多面體的透深,所以也不能刪除常規(guī)多面體間滲透量。
SmartCollision的功能
支持的數(shù)據(jù)繼承
| 物體類型 | 說明 |
| 復合凸狀多面體 | 任意的凸狀多面體集合 |
| 常規(guī)閉合非凸狀多面體 | 常規(guī)多面體,多面體必須是閉合的 |
| 多邊形(三角形)集 | 任意的三角形集合 |
碰撞檢測功能
| 碰撞檢測功能 | 說明 |
| 交叉檢測 | 交叉處的boolian值 |
| 最小距離(Vector) | 當物體脫離時,物體間的最小距離(Vector) |
| 透深(Vector) | 當物體互相滲透時,物體間的動態(tài)透深(Vector) |
SmartCollision?在PHANTOM上的觸覺應用
兩道難關
通常情況下,利用PHANTOM的觸覺應用可以感受到點和物體之間的碰撞。但對某些可以感受到多面體之間的碰撞應用來說,通過利用PHANTOM產(chǎn)生觸覺來感受常規(guī)多面體之間的碰撞的應用中有兩個柵格來感覺碰撞。
一個難關是PHANTOM觸覺應用需要1 kHz的幀速率對常規(guī)物體間的碰撞檢測。該問題非常難以解決。
另外一個難關是以可靠精確的方法來計算不確定的常規(guī)物體間的透深。
SmartCollision?克服了這兩個難題,并且解決了在常規(guī)多面體間感受碰撞的觸覺應用。
通過Penalty方法(Penalty method)利用動態(tài)透深計算觸點壓力
SmartCollision?可以計算虛擬物體間的動態(tài)透深。因此,觸點壓力可以很容易的通過Penalty方法(Penalty method)利用動態(tài)透深計算觸點壓力。Penalty方法(Penalty method)與透深成比例的計算觸點壓力并能獲得穩(wěn)定的虛擬物體碰撞操作。
6DOF PHANTOM應用
三維物體有3個自由度的平移,3個自由度的旋轉,總共6個自由度(6DOF)。可以通過利用6DOF PHANTOM控制虛擬物體獲得真實的感覺,SmartCollision?利用6DOF PHANTOM進行充分的擴展
電話:010-50951355 傳真:010-50951352 郵箱:sales@m.gentlemenlisten.com ;點擊查看區(qū)域負責人電話
手機:13811546370 / 13720091697 / 13720096040 / 13811548270 /
13811981522 / 18600440988 /13810279720 /13581546145

