汽車工程師使用MTi-G測試和提高汽車性能
MTi-G動作捕捉設備為汽車性能的測試和提高提供經濟準確的跟蹤測量方式
|
法國布杜爾專業賽車場在Nogaro巡回賽中使用了MTi-Gin的生化賽車系列體育原型(LMP2款24小時勒芒汽車)進行比賽分析。通過對MTi-G獲取的數據進行后期處理,得出了下列數據:
汽車工程師通常使用高端系統來測試和提高設備性能,這些系統十分準確,但價格昂貴,較為笨重;但使用MTi-G的所得到的測量數據,許多參數的準確性與高端設備相同,價格卻僅是高端設備的一小部分,還具有重量輕、功耗低的優勢。 測量設置
MTi-G安裝在合適的振動阻尼器頂部。采用有效的抗振動裝置可以有效地減少MTi-G設備遇到的震動。較大的震動可以影響MTi-G裝置的測量精度。 生化賽車LMP2產品性能
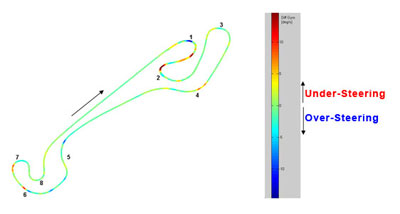
理論 過度轉向和轉向不足 如果速度除以半徑,減去車輛的轉率(Gz),也可以計算出DiffGyro參數。DiffGyro參數可以測定出過度轉向或轉向不足的問題。
圖3:過度轉向的情況。賽車的轉彎速度可以通過陀螺儀速率測出,彎道速度是采用MTi-G設備通過全球定位系統數值計算得出。DiffGyro小于零或陀螺儀轉彎速度高于賽道的彎道速度。θ是汽車在重心的滑移角。 滑移角(圖3) 軌道半徑 加速度和方向屬性 結果 從MTi-G數據得出如下結論: 過度轉向和轉向不足
由這張圖可以迅速注意到以下幾點: 確定最佳的比賽線路
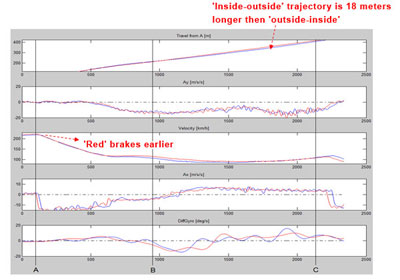
圖5顯示了數據采集圖(從MTi-G數據單獨提取),與曲線1軌道上相應的點A、B和C。 X軸顯示了A的樣本數量(直接與時間有關:樣本速率為200Hz)。圖5是曲線1加速的平面圖,其中司機測試了連續兩圈中兩個不同的軌跡(“由內到外”和“由外到內”)。
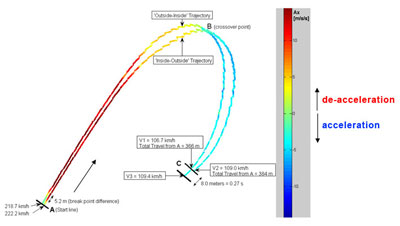
使用MTi-G數據,可以計算出剎車點的精確位置和兩個剎車點之間的精確距離:5.2米(“由外到內”軌跡必須提前剎車,首先是為了趕上的彎道內側,其次是因為A點的進入速度較高)。MTi-G與兩個軌跡的對應時間是完全一致的。因此,可以立即推斷出,由內到外的線路比由外到內的線路速度更快,因為在同一時間內,司機多行駛了8.0米。如果采用由內到外線路,司機可以節省0.27秒時間。由內到外的線路更像是一個V字型方程式軌跡,曲線內部的第二個軌跡更加平滑。這可以通過計算軌道半徑(B點周圍)的最低值來判定:37.7米,另一個則為40.4米。 僅從圖6所采集到的數據來看,‘內-外’軌道中C點的速度看起來有點高,這是因為它是時間的函數:在C點有一個0.27秒的延遲對應8.0米的路程。所以C點的速度即V3應該是109.4公里/小時,而不是106.7公里/每小時(見圖5)。有趣的是,由外到而內的軌跡中,B點的速度加快,從而以更快的109.0公里/小時的速度駛離這條軌跡,這是因為在該軌道的這一部分,賽車有更多的抓地力。現在我們來縱觀一下整個轉向過程,在由內而外的轉向軌道中,‘V’形部分(即在圖5中DiffGyro值為負的黑色橢圓曲線部分)是整個行駛過程中速度最快的部分,由此可以推斷出,‘V’形部分的初期開始加速,如圖5B點速度所示,之后則開始減速。 結論 無論是體積,功耗還是成本,相較于高端測量系統,MTi- G是分析改進賽車應用數據的理想選擇。 |



 打印本文
打印本文 關閉窗口
關閉窗口