目的
預(yù)防性人體工程學對于保護工人的健康和安全至關(guān)重要,因為認識到人類的差異性也很重要。本文的目的是描述一個基于 Unity 的應(yīng)用程序,該應(yīng)用程序設(shè)計用于使用運動捕捉數(shù)據(jù)進行三維姿勢分析和可視化。與虛擬現(xiàn)實 (VR) 技術(shù)的集成使用戶能夠沉浸在模擬的工作環(huán)境中,而無需物理原型。擬議的應(yīng)用程序旨在促進人體工程學原理在工作場所設(shè)計和評估中的應(yīng)用,以積極主動、參與性和包容性的方式促進工人福祉。
作者開發(fā)了一款利用動作捕捉技術(shù)和 VR 技術(shù)的應(yīng)用程序,旨在幫助分析師對物理原型以及未來工作場所進行人體工程學評估。創(chuàng)新的姿勢預(yù)測模塊可幫助分析師從單個數(shù)據(jù)記錄中了解不同用戶在與工作場所互動時可能采取的姿勢。
發(fā)現(xiàn)
一些案例研究說明了所提議的應(yīng)用程序的功能,展示了如何提供不同的信息以及如何在工業(yè)環(huán)境中支持工作場所分析師和設(shè)計師。
原創(chuàng)性/價值
本文深入介紹了汽車公司在應(yīng)用可穿戴傳感器和 VR 方面的經(jīng)驗和研究,以支持主動和參與式的工作場所人體工程學方法。
1.引言
新的信息和通信技術(shù)引入工廠環(huán)境正在推動制造業(yè)發(fā)生深刻變革。智能工廠是德國政府于 2010 年設(shè)想的工業(yè) 4.0 的一個關(guān)鍵要素,系統(tǒng)變得信息物理化,相互交互,監(jiān)控和驗證物理過程,創(chuàng)建物理世界的虛擬副本并根據(jù)復(fù)雜的數(shù)據(jù)分析做出決策,正在成為現(xiàn)實。這些概念正在徹底改變所有領(lǐng)域的工業(yè),而汽車行業(yè)是其中的先行者之一,也是參與度最高的行業(yè)之一。
制造過程的虛擬化和仿真在成本和時間方面具有多種優(yōu)勢,同時還可以優(yōu)化裝配線設(shè)計和研究人機交互。利用技術(shù)創(chuàng)新在當今的制造環(huán)境中至關(guān)重要,其特點是包含用戶、機器和系統(tǒng)的復(fù)雜協(xié)作范式。在設(shè)計階段融入人體工程學原理可以減輕不利后果,例如部署延遲、質(zhì)量下降和最終系統(tǒng)的可用性降低。它還有助于避免后續(xù)修改系統(tǒng)所需的額外成本。各種研究和行業(yè)趨勢都支持對人為因素的認識。
在此背景下,虛擬現(xiàn)實 (VR) 是一項值得利用的關(guān)鍵研究技術(shù),它可以作為一種先進的人機界面,實時模擬現(xiàn)實世界并通過多種感官通道與數(shù)字對象進行各種交互。VR 可應(yīng)用于娛樂、醫(yī)藥、文化、營銷、教育和文化遺產(chǎn)等各個領(lǐng)域。近年來,一個特別值得注意的領(lǐng)域是工業(yè)原型設(shè)計。直到幾年前,解決系統(tǒng)故障和事故的措施主要集中在降低風險因素上。然而,三維 (3D) 設(shè)計軟件和虛擬模擬器的進步現(xiàn)在使設(shè)計師能夠?qū)?VR 技術(shù)集成到設(shè)計過程中,并在進入物理原型設(shè)計階段之前在模擬環(huán)境中測試和驗證工具。
在虛擬環(huán)境中,可以使用數(shù)字人體模型(虛擬人體模型)模擬人與工作場所之間的交互,而可以使用 CAD 模型導(dǎo)入工作場所和工作站。人體模型是符合自然比例的人體形象的虛擬表示,可以通過正運動學或逆運動學 (IK) 進行控制和動畫制作。虛擬人體模型有多種應(yīng)用范圍,其中許多符合個人、團體和團隊工作場所學習的原則:考慮在沉浸式虛擬現(xiàn)實中學習特定機械零件的裝配順序,在尚未建造物理原型時為操作員提供培訓 。
本文旨在介紹一個基于 Unity 的工作場所設(shè)計和評估應(yīng)用程序,該應(yīng)用程序利用慣性測量單元 (IMU) 傳感器記錄運動數(shù)據(jù)。與 VR 技術(shù)的集成使用戶無需物理原型即可沉浸在模擬工作環(huán)境中。該應(yīng)用程序旨在支持分析師通過可穿戴設(shè)備評估工作場所設(shè)計,但也可用于在職培訓。所展示應(yīng)用程序的一個創(chuàng)新功能是可以預(yù)測屬于與記錄運動捕捉數(shù)據(jù)的個人不同的人體測量百分位數(shù)的用戶的姿勢。識別人體變異是人體工程學的基礎(chǔ),以確保滿足小用戶的可達性和大用戶的身體空間問題,同時確保所有用戶的姿勢舒適度。另一方面,組織幾次測試會議以包括不同身高的用戶既復(fù)雜又昂貴。
本文分為幾個部分。背景部分探討了基于傳感器和虛擬現(xiàn)實技術(shù)的自動人體工程學評估的必要性,隨后是對作者設(shè)計的基于 Unity 的應(yīng)用程序的綜合描述,該應(yīng)用程序旨在支持分析師評估工人在工作任務(wù)期間的姿勢和身體運動。然后介紹了對屬于人體測量百分位數(shù)(而不是記錄運動捕捉數(shù)據(jù)的個人的百分位數(shù))的用戶的姿勢預(yù)測,并介紹了一些應(yīng)用案例。最后,討論了結(jié)論和未來工作。
2.背景
在工人平均年齡穩(wěn)步增長、生產(chǎn)率要求不斷提高的當今世界,人體工程學面臨的一個重大挑戰(zhàn)是如何通過設(shè)計一個能夠保護肌肉骨骼健康的工作環(huán)境來改善員工的福祉。肌肉骨骼疾病 (MSD) 影響著歐洲各地無數(shù)工人,他們遭受肌肉、神經(jīng)、肌腱、關(guān)節(jié)和脊椎間盤的損傷和疾病。這些健康問題包括疼痛以及可能導(dǎo)致工作日損失的更嚴重的疾病。因此,解決工作場所設(shè)計問題具有雙重意義:改善工人的福祉和提高生產(chǎn)率。
肌筋膜炎的危險因素包括重復(fù)性動作、不良姿勢和搬運重物。肌筋膜炎是最常見的工作相關(guān)疾病之一,占歐洲職業(yè)病的 45% 左右。在整個歐洲,肌筋膜炎影響著數(shù)百萬工人,給雇主造成數(shù)十億歐元的損失。職業(yè)病和危害還可以與更普遍的健康狀況指標以及人口工作條件有關(guān)。國家法律規(guī)定了如何評估工作條件。因此,公司對建立有效和高效的工作場所設(shè)計方法的興趣是顯而易見的。將工作站設(shè)計過程定義為“導(dǎo)致工作場所誕生的活動”。設(shè)計工作場所時要考慮的主要問題之一是適應(yīng)生產(chǎn)變化;靈活性對于滿足市場需求至關(guān)重要。以人為本的工作場所概念的出現(xiàn)是為了解決這一問題,概述了在工作場所設(shè)計過程中納入人體工程學原則的必要性。
一些人體工程學評估方法都是觀察性方法,主要研究姿勢分析,例如 Ovako 工作姿勢分析系統(tǒng)、快速上肢評估或快速全身評估。通常,這些方法用于以被動的方式評估現(xiàn)有的工作環(huán)境以應(yīng)對人體工程學。物理原型的高成本大大降低了主動解決人體工程學問題的可能性,而主動解決人體工程學問題的目標恰恰是在工作場所出現(xiàn)潛在問題之前就發(fā)現(xiàn)它們。
VR 技術(shù)正在成為主動人體工程學的關(guān)鍵工具,因為它們可以幫助工作場所設(shè)計師克服這一限制,使開發(fā)人員能夠在沉浸式環(huán)境中以 1:1 的等效比例可視化工作站的所有元素。此外,VR 解決方案與動作捕捉 (MoCap) 技術(shù)相結(jié)合以顯示工人的動作和姿勢時可能會帶來收益。Menolotto對不同的 MoCap 技術(shù)以及與數(shù)據(jù)管理和處理相關(guān)的問題進行了系統(tǒng)的文獻綜述。
將人體工程學原理、VR 和 MoCap 解決方案相結(jié)合,實現(xiàn)以人為本的工作場所設(shè)計的總體優(yōu)勢可總結(jié)如下:實驗和模擬的可重復(fù)性;記錄和處理實驗數(shù)據(jù)的可能性;靈活地創(chuàng)建能夠響應(yīng)市場需求同時尊重現(xiàn)有標準的環(huán)境;實時進行人體工程學評估的可能性。多篇論文研究了集成 VR-MoCap 系統(tǒng)相對于傳統(tǒng)計算機輔助解決方案的優(yōu)勢。系統(tǒng)的文獻綜述可參見da Silva等人(2020)的文章。Simonetto提出了一個方法框架,使裝配系統(tǒng)的設(shè)計人員能夠考慮到工人因年齡等原因而產(chǎn)生的不同體力和關(guān)節(jié)活動性。3.建議的應(yīng)用:系統(tǒng)架構(gòu)和工作流程
本節(jié)對所提出的基于 Unity 的應(yīng)用程序和系統(tǒng)工作流程進行了綜合描述。所提出的應(yīng)用程序利用 MoCap 和 VR 技術(shù)的集成,通過一系列功能支持分析師對物理原型和未來工作場所進行人體工程學評估,其中包括:通過運動捕捉數(shù)據(jù)執(zhí)行 3D 姿勢分析,提供虛擬現(xiàn)實環(huán)境,以評估工人與工作站之間的交互,同時監(jiān)測姿勢指標并估計不同人體百分位數(shù)工人的身體姿勢和動作。這些功能將在下文簡要介紹。3.1?.用于三維姿勢分析的 MoCap 系統(tǒng)
姿勢舒適度對于工人的健康和以人為本的工作場所設(shè)計至關(guān)重要。傳統(tǒng)上,訓練有素的分析師會觀察工人,并通過估計所分析工作活動的視頻或圖片中的投影角度來評估關(guān)節(jié)角度。主觀觀察很耗時,并且可能存在觀察者之間和觀察者內(nèi)部的差異。近年來,可穿戴傳感器已證明具有足夠的精度來評估姿勢和身體運動并進行定量人體工程學評估。當工人在裝配線上或物理原型上執(zhí)行任務(wù)時,可以記錄數(shù)據(jù),即使在長時間操作期間也可以提供有關(guān)不同關(guān)節(jié)位置的寶貴信息。
Carnazzo提出了一種 3D 姿勢分析算法,該算法直接從安裝在工人身上的可調(diào)節(jié)帶子的 IMU 收集數(shù)據(jù)(圖 1),并通過反三角函數(shù)自主計算身體部位之間的角度。根據(jù)相關(guān)標準 EN 1005–4和 ISO 11226定義了頸部、軀干、肩部、肘部、手腕和膝蓋的不同身體角度,這些標準規(guī)定了工作姿勢的可接受角度和保持時間,并構(gòu)成了風險評估方法的基礎(chǔ)。為了方便分析人員查看和檢索信息,我們特別注重創(chuàng)建直觀、直接的用戶界面。在系統(tǒng)啟動時,分析人員可以選擇顯示實時捕獲的動作捕捉數(shù)據(jù)的模式或分析預(yù)先記錄的數(shù)據(jù),并可以使用 RGB 攝像機和 IMU 運動跟蹤系統(tǒng)同步記錄工作活動。對于手動數(shù)據(jù)同步,佩戴 IMU 傳感器的用戶只需拍手即可啟動記錄階段。
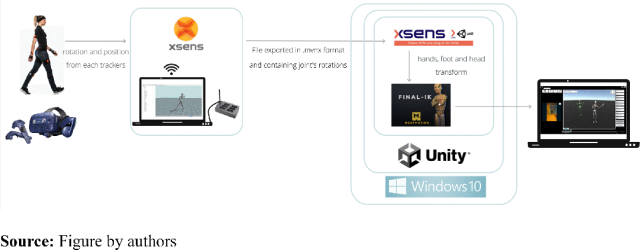
圖2是用于分析預(yù)先記錄的數(shù)據(jù)的用戶界面示例。分析人員可以選擇不同的視圖和人體模型表示類型,即僅使用連接代表關(guān)節(jié)的球體的線來可視化內(nèi)部運動鏈(綠色火柴人)、完整的 3D 人形或兩者的疊加。該應(yīng)用程序允許保存在特定時間范圍內(nèi)顯示的所有角度信息。具體而言,通過圖形界面上的按鈕,分析人員可以保存所有顯示模式下的姿勢角度、視頻捕獲和虛擬場景的所有值。此信息存儲在 HTML 格式的文件中,可能包括分析人員輸入的文本注釋。圖 3顯示了關(guān)節(jié)角度可視化的圖形用戶界面。下拉菜單允許選擇可在屏幕上顯示的姿勢角度。可以分析十個不同的角度:頸部、軀干、肩部、肘部、手腕和膝蓋。這些角度的識別是許多風險評估方法的基礎(chǔ)。用于動作捕捉的可穿戴傳感器是研究和自動化人體工程學評估中極具潛力的工具。然而,物理原型成本高昂,并且需要花費大量時間來構(gòu)建。如背景部分所述,虛擬化的一個有趣發(fā)展是將動作捕捉技術(shù)與 VR 技術(shù)相結(jié)合。頭戴式顯示器提供的視覺反饋允許記錄用戶與虛擬環(huán)境交互時的姿勢和動作。得益于 VR 技術(shù),在沒有工作站物理原型的情況下,姿勢指標和風險評估成為可能。圖4描繪了所提出的軟件和硬件架構(gòu)的方案。姿勢數(shù)據(jù)通過 Xsens Awinda 運動捕捉系統(tǒng)記錄,該系統(tǒng)包括 17 個無線 IMU 傳感器,通過可調(diào)節(jié)的帶子安裝在用戶身上,并通過 Xsens MVN 軟件轉(zhuǎn)發(fā)到 Unity 應(yīng)用程序。Xsens 軟件開發(fā)套件用于正確管理 Unity 應(yīng)用程序內(nèi)的數(shù)據(jù)。捕捉系統(tǒng)向 Unity 應(yīng)用程序提供傳感器相對于地球參考局部框架的精確 3D 方向。Unity 被選為全球領(lǐng)先的游戲引擎,用于在多個平臺和設(shè)備上創(chuàng)建和部署沉浸式體驗,所提出的人體工程學分析算法是用 C# 編寫的。評估過程可能需要或不需要護目鏡,這取決于模擬是在虛擬還是在現(xiàn)場進行。虛擬現(xiàn)實模擬使用的技術(shù)是護目鏡,特別是 HTC VIVE 頭戴式顯示器。用戶可以通過佩戴帶有運動跟蹤傳感器的 HMD 頭盔來查看 3D 立體圖像并在視覺世界中確定自己的空間位置。在某些應(yīng)用中,耳機與 Leap Motion 控制器相結(jié)合,這是一種光學手部跟蹤系統(tǒng),允許用戶通過手部動作來操縱數(shù)字對象。圖5左側(cè)顯示了配備 Xsens Awinda 系統(tǒng)、HTC VIVE HMD 和 Leap Motions 控制器的用戶圖像,右側(cè)顯示了其在虛擬環(huán)境中的虛擬表示。人體模型(以下將稱為 Xsens 人體模型)復(fù)制了記錄會話中使用的用戶的人體測量尺寸。人體模型的動作和姿勢基于運動捕捉系統(tǒng)記錄的數(shù)據(jù)。3.3?.使用不同人體測量百分位數(shù)進行姿勢預(yù)測身體姿勢和姿勢角度是工人體型的特征。然而,認識到人體的多樣性是人體工程學的關(guān)鍵。動作捕捉和虛擬現(xiàn)實技術(shù)可以幫助預(yù)測不同體型的用戶在工作站驗證的早期階段如何與給定的工作站交互,并確保工作站滿足大多數(shù)用戶的安全和舒適要求。在汽車領(lǐng)域,與許多其他領(lǐng)域一樣,通常參考男性和女性的第 5、50 和 95 個百分位數(shù)(即 P5、P50 和 P95),以適應(yīng)大多數(shù)勞動人口。然而,對不同體型的用戶重復(fù)數(shù)據(jù)記錄會話既費時又費錢。因此,對于公司來說,能夠使用記錄在單個用戶身上的數(shù)據(jù)來估計不同身高的用戶在與同一工作環(huán)境交互時可能采取的姿勢是非常有意義的。提前評估不同身高工人的姿勢風險對于確保滿足所有用戶的姿勢舒適度、小用戶的可達性需求和大用戶的身體空間問題非常重要。可以使用 IK 引擎預(yù)測任何給定時間的數(shù)字人體模型的姿勢,結(jié)合經(jīng)驗豐富的人體工程學專家定義的姿勢規(guī)則,可以預(yù)測數(shù)字人體模型的運動。IK 的概念起源于機器人領(lǐng)域,特別是為了解決將機械臂定位在特定的預(yù)定義位置的問題。運動鏈是由關(guān)節(jié)連接的剛性部件的排列,就像人體骨骼系統(tǒng)一樣,并提供受約束的運動。IK 求解器可能會根據(jù)關(guān)節(jié)約束找到人體模型姿勢問題的多種解決方案,如果目標點無法到達,則可能找不到解決方案。圖6描述了所提出的姿勢預(yù)測應(yīng)用程序的一般功能。為了使系統(tǒng)正常工作,需要進行初步的運動捕捉會話。IMU 傳感器記錄的數(shù)據(jù)被導(dǎo)出到 Unity,用戶的動作在那里被復(fù)制。直接模式操作允許分析師直接控制人體模型的手、腳、臀部、肩膀(左右)和骨盆的效應(yīng)器,以防分析師希望糾正某些姿勢或缺少某些數(shù)據(jù)。姿勢預(yù)測算法是使用 Final IK 開發(fā)的,它是 Unity 的領(lǐng)先 IK 庫,在視頻游戲制作中被廣泛采用。這個 Unity IK 插件提供了各種模塊:FullBodyBiped IK 用于為人體化身制作動畫,而 LookAt IK 組件用于幫助將人體模型的頭部旋轉(zhuǎn)到目標點。這些模塊已擴展為基于人體模型的附加人體工程學姿勢規(guī)則,該規(guī)則可根據(jù)雙腳的位置和手部的工作點預(yù)測工人最可能采取的姿勢。該系統(tǒng)的好處是可以比較屬于不同百分位數(shù)的人體模型的預(yù)測姿勢,從而驗證適用于各種用戶的工作站,同時考慮到所有用戶的姿勢舒適度以及 P5 人體模型的可達性需求以及 P95 的身體空間問題。所提出的基于 Unity 的集成 MoCap 和 VR 技術(shù)的應(yīng)用程序已應(yīng)用于各種用例,也可供分析師評估其有效性和可用性。圖7中重現(xiàn)的任務(wù)是車頂行李架組裝,其中工人必須將車頂行李架放置在汽車車頂上并用螺釘和支架固定。從人體工程學風險評估和操作員培訓的角度來看,這是一項非常有趣的任務(wù)。在汽車車頂上組裝元件可能需要工人采取不協(xié)調(diào)的姿勢,雙手高于肩膀高度。此外,可能還存在到達汽車車頂內(nèi)部點的問題。因此,這項任務(wù)可能值得事先虛擬分析,考慮到不同身高的工人,以及通過改善可達性來創(chuàng)建一個提升工人的平臺的可能性。值得注意的是,車頂行李架組裝需要按照特定順序執(zhí)行一系列操作,操作員必須學會重復(fù)這些操作,而且這需要良好的靈活性。在這方面,VR 環(huán)境提供了在職培訓的可能性,讓工人沉浸在執(zhí)行工作任務(wù)的任務(wù)環(huán)境中,讓他或她不僅可以練習,還可以就工作場所和工作任務(wù)的設(shè)計提供反饋。第二步,將 HTC VIVE HMD 與 Leap Motion 控制器集成,以更好地模擬抓取物體的動作,從而實現(xiàn)手與物體的交互(圖5)。對代表不同身高的用戶(即 P5、P50 和 P95 女性和男性百分位數(shù))進行動作捕捉記錄會話,以突出預(yù)測系統(tǒng)中的關(guān)鍵問題。圖8重現(xiàn)了 Unity 中用于模擬的虛擬工作站,而圖9則顯示了分析師分析記錄數(shù)據(jù)的用戶界面。右側(cè)的人體模型是 Xsens 人體模型,它使用從運動捕捉會話中獲得的信息復(fù)制工人的姿勢,而左側(cè)的人體模型則由姿勢預(yù)測系統(tǒng)擺出姿勢(下文中將稱為 Final IK 人體模型)。菜單允許分析師通過直接輸入人體測量數(shù)據(jù)或選擇姿勢預(yù)測的目標百分位數(shù)來更改人體模型的大小。如果沒有選擇百分位數(shù),則系統(tǒng)默認使用 P50 男性人體模型運行。菜單還允許分析師更改相機方向并確保正確查看兩個人體模型。通過將工作環(huán)境的數(shù)字孿生導(dǎo)入 Unity 場景,分析師可以直觀地看到人體模型在場景中的移動方式,系統(tǒng)可以檢測到與物體的潛在碰撞并相應(yīng)地調(diào)整人體模型的姿勢。對于任何 IK 解算器來說,一個重大挑戰(zhàn)是重現(xiàn)逼真的姿勢。Unity 中提供的 IK 引擎旨在用于游戲,并返回可能未正確考慮工作中的人體工程學原理的姿勢。典型的例子是,到達靠近地面的工作點可能需要背部向前彎曲,但應(yīng)該涉及彎曲膝蓋(圖10a)或與要執(zhí)行的工作相關(guān)的視覺需求,而這些需求經(jīng)常被 IK 引擎忽略(圖10b)。為了克服這些限制,根據(jù)公司專業(yè)人體工程學專家的經(jīng)驗,考慮了額外的姿勢規(guī)則。
這些附加規(guī)則提高了姿勢預(yù)測模塊在不同百分位數(shù)上的有效性,因為它是通過比較姿勢預(yù)測模塊返回的關(guān)節(jié)角度和運動捕捉系統(tǒng)返回的關(guān)節(jié)角度來評估的。對任務(wù)期間出現(xiàn)的最相關(guān)姿勢進行了更有針對性的分析。對于每個選定的姿勢,比較了不同的關(guān)節(jié)角度。圖11左側(cè)描繪了 P5 男性人體模型的姿勢,重現(xiàn)了進行動作捕捉記錄的用戶的人體測量數(shù)據(jù),右側(cè)描繪了 P95 男性的預(yù)測姿勢。即使記錄是在不同的百分位數(shù)上進行的,姿勢預(yù)測模塊也會返回逼真的姿勢。系統(tǒng)認識到,較高的用戶需要向前彎曲背部才能達到相同的工作點,并彎曲脖子以縮短觀看距離。圖11上重現(xiàn)的P95的預(yù)期姿勢是根據(jù)與實施的人體工程學規(guī)則相關(guān)的姿勢策略確定的。公司感興趣的另一個方面是不同身高的工人與工作站中可能存在的障礙物的互動。例如,一種可能的情況是工作底盤。由于沒有實驗測試包括工人與工作站物品之間的碰撞,因此通過提供目標坐標來完成避障系統(tǒng)的驗證。在這個初步評估階段,該系統(tǒng)被證明能夠檢測與物體的碰撞。人體模型為處理與障礙物的互動而采取的姿勢策略是合理的(圖12)。?
5.結(jié)論和未來工作
本文介紹了一款基于 Unity 的應(yīng)用程序,該應(yīng)用程序利用可穿戴傳感器和虛擬現(xiàn)實技術(shù),并介紹了該應(yīng)用程序如何以主動的方式在設(shè)計早期階段促進人體工程學原理的應(yīng)用。該應(yīng)用程序支持分析師進行工作場所設(shè)計和評估以及風險評估工具的應(yīng)用。關(guān)節(jié)角度根據(jù)相關(guān)技術(shù)標準計算,分析師可以將其用作風險評估工具的輸入數(shù)據(jù),從而消除了通常與主觀觀察相關(guān)的觀察者間和觀察者內(nèi)的差異。創(chuàng)新的姿勢預(yù)測模塊可幫助分析師預(yù)測屬于不同人體測量百分位數(shù)的用戶在與給定工作站交互時可能的身體姿勢,該工作站可以是物理原型或 VR 中的模擬環(huán)境。認識到人體的多樣性是人體工程學的基礎(chǔ),它確保滿足所有用戶的姿勢舒適度,滿足小用戶的可達性需求,以及大用戶的身體空間問題。未來的工作將側(cè)重于提高從單個數(shù)據(jù)記錄中預(yù)測各種用戶的姿勢的準確性,特別是在工作場所存在障礙物等特殊情況下。工人可能會采用多種策略來執(zhí)行任務(wù),事實上,任何姿勢預(yù)測系統(tǒng)的主要復(fù)雜性恰恰在于 IK 問題的不確定性。為了解決 IK 問題的不確定性,可以以姿勢規(guī)則的形式添加約束,這可能與任務(wù)的性質(zhì)和工作站的組織有關(guān)。這些姿勢規(guī)則最初可以根據(jù)專業(yè)人體工程學專家的經(jīng)驗來定義,但隨著數(shù)據(jù)量的增加,可以通過機器學習技術(shù)進行改進。基于良好人體工程學的姿勢規(guī)則的實施應(yīng)該成為工作站設(shè)計和評估過程中預(yù)防工作相關(guān)肌肉骨骼疾病的任何支持工具的基礎(chǔ),也應(yīng)成為在職培訓、員工參與度和工作環(huán)境中的表現(xiàn)的基礎(chǔ)。可穿戴傳感器和 VR 是主動研究人體工程學的關(guān)鍵工具,因為它們是沉浸式虛擬環(huán)境中的在職培訓工具。可用的 VR 系統(tǒng)可確保沉浸式和交互式環(huán)境:還可以通過觸覺設(shè)備為用戶提供對其動作的觸覺和力量反應(yīng)。如今,在實現(xiàn)這些虛擬環(huán)境時可以達到的邏輯和圖形復(fù)雜度使得 VR 的使用范圍可以擴展到姿勢負荷評估之外。心理負荷評估變得越來越重要,VR 在認知負荷研究中的應(yīng)用也比以往任何時候都更加重要。這些技術(shù)在工作場所學習方面的巨大潛力不僅涉及工人,還涉及分析師和設(shè)計師。工作場所分析師和設(shè)計師可以按照“假設(shè)”方法在虛擬環(huán)境中探索不同的場景,并且可以在設(shè)計早期階段獲得設(shè)計選擇和評估方面的支持。他們還可以從工人那里獲得有關(guān)工作場所設(shè)計的重要反饋,而無需物理原型,并確保真正參與式的設(shè)計方法。不同利益相關(guān)者的參與是人體工程學的基礎(chǔ),對于確保高效和包容的工作場所必不可少。
這項工作是兩年期項目 IM.PR.ES.SED(可穿戴設(shè)備的沉浸式人體工程學過程)的一部分,該項目由 Stellantis(意大利 FCA)協(xié)調(diào),與都靈理工大學、坎帕尼亞大學 Luigi Vanvitelli、都靈 CIM4.0(工業(yè)制造 4.0 能力)合作提供技術(shù)和開發(fā)咨詢,并與 Mare Digital 合作提供沉浸式現(xiàn)實工具。搜維爾科技與Varjo總部簽署代理合作協(xié)議,成為其在中國大陸地區(qū)的獨家授權(quán)代理經(jīng)銷商。搜維爾科技現(xiàn)支持Varjo頭戴式顯示器相關(guān)產(chǎn)品購買、咨詢與售后支持等服務(wù),歡迎垂詢。


Awinda版")
Awinda版")
 Link版")
 Link版")
據(jù)手套")